- 8 (812) 612-97-27
- СПБ, Курчатова дом 1А помещение 1Н
- order@das-elektro.de

В статье сравниваются схемы, осуществляющие управление динамиком с помощью сигналов тока и напряжения. Показаны преимущества управления током.
Цифровые градиентные усилители, используемые в оборудовании магнитно резонансной томографии для визуализации (МРВ), во многом похожи на звуковые усилители класса D. Отличие заключается в том, что первые из них обладают высокой мощностью и абсолютной точностью, которые выходят далеко за пределы возможностей коммерческих звуковых усилителей.
В системах МРВ запускающее устройство содержит контроллер тока, который обеспечивает точный градиент проходящего через пациента магнитного поля без обратной связи (ОС) от магнитного поля.
Полоса пропускания усилителя начинается с нулевой и уходит далеко за пределы слышимого звука. задержка распространения сигнала одинакова во всем спектре.
Как правило, на каждой из катушек индуктора для трех пространственных осей используется отдельный усилитель. Многие системы МРВ усиливают ток и напряжение в два–четыре раза. Для моделирования градиентных катушек, представляющих собой сложную нагрузку, используются импедансы 3-го или 5-го порядка. Если питать эти катушки от источника тока, а не источника напряжения, обеспечивается очень высокая точность создания требуемого магнитного поля.
Главным отличием звуковых усилителей является то, что они управляются источником напряжения, а не тока. Это относится ко всем типам звуковых усилителей, включая классы A, B, AB, D, G, H и т. д.
В то же время при управлении током линейность характеристики динамика лучше. Мы рассмотрим усилители класса D и решения, позволяющие адаптировать эти усилители для работы с токовым сигналом. звуковые усилители преобразуют амплитуду сигнала в длительность рабочего цикла или периодический импульс с фиксированной либо переменной длительностью.
Коммерческие усилители класса D
В то же время при управлении током линейность характеристики динамика лучше. Мы рассмотрим усилители класса D и решения, позволяющие адаптировать эти усилители для работы с токовым сигналом. звуковые усилители преобразуют амплитуду сигнала в длительность рабочего цикла или периодический импульс с фиксированной либо переменной длительностью.
Большинство ИС усилителей класса D вырабатывают модулированный во времени переключающийся сигнал, который поступает в динамик. Этот сигнал в упрощенном случае можно рассматривать как высокочастотный ШИМ-сигнал.
Принцип работы
Для получения ШИМ-сигнала аналоговый звуковой сигнал сравнивается с высокочастотным линейным сигналом, чаще пилообразной формы. Результат сравнения с компаратора представляет собой импульс, периодичность которого равна периодичности линейного сигнала; рабочий цикл представляет собой уровень порога срабатывания исходного аналогового сигнала.
Фактически, производится выборка сигнала, и фиксированная частота переключения FSW является несущим сигналом. Согласно критерию Найквиста, она должна быть, по крайней мере, вдвое больше самой высокой частоты в спектре обрабатываемого сигнала (см. рис. 1).
Несущая частота находится вне слышимого диапазона. ШИМ-сигнал поступает через буфер на динамик и обеспечивает требуемое напряжение и ток. Для ослабления электромагнитного излучения сигнал фильтруется перед подачей его в динамик.
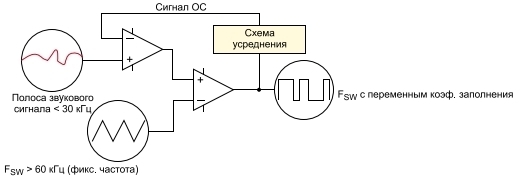
Точность схемы повышается за счет добавления контура обратной связи со схемой усреднения, которая удаляет шум в несущем сигнале и фильтрует выходной сигнал, пропуская только составляющие в звуковом диапазоне (см. рис. 2). При этом вносится малая задержка, или фазовое искажение. Следует иметь в виду, что при неправильном проектировании схема усреднения вносит большие искажения. По этой причине во многих схемах ОС разомкнута.
Рисунок 1
Рисунок 2
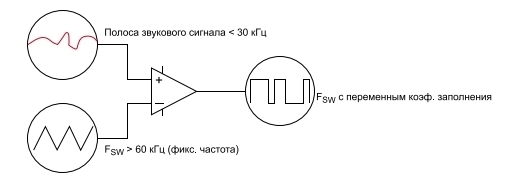
Упрощенная схема с открытой петлей ОС на основе усилителя класса D для генерации сигнала ШИМ
Упрощенная схема с закрытой петлей ОС на основе усилителя класса D для генерации сигнала ШИМ
Недостатки усилителей класса D
Компаратор
Выход компаратора меняет состояние при сравнении двух уровней напряжения. Ошибки при сравнении влекут за собой преобразование неправильных абсолютных значений амплитуды звукового сигнала, в результате чего возникает искажение. Основными источниками ошибки компаратора являются следующие.
– Несимметричное смещение. Выборка звукового сигнала производится по-разному при возрастающем и ниспадающем фронтах сигнала. Ширина импульса – разная при одном и том же уровне амплитуды.
– Расхождение задержек, или несимметричность. задержки создают сдвиг фаз в выходном сигнале. Если дискретизация сигнала производится по-разному при возрастающем и падающем сигнале, то ширина импульса не совпадает при одном и том же уровне звукового сигнала. Возникают сильные гармонические искажения при увеличении звуковой частоты.
– Полоса пропускания. Поскольку у компаратора – ограниченный коэффициент усиления, его динамический диапазон определяет самый малый детектируемый сигнал. Как правило, используется 16-разрядные выборки для динамического диапазона 96 дБ, т. е. разрешение составляет примерно 1 на 65 535.
Рассмотрим, как динамический диапазон влияет на требования к коэффициенту усиления компаратора. Если он работает от напряжения питания 5 В и размах напряжения равен 5 В, необходимо детектировать и переключить состояние выхода при напряжении менее 76 мкВ и общей задержке не более 16 мкс. Таким образом, коэффициент усиления компаратора составляет 62,5 В на мВ. При меньшем коэффициенте разрешение становится неприемлемым.
Таким образом, требуется качественный компаратор, способный обнаружить столь малые различия во входном сигнале. Кроме того, его характеристики должны быть устойчивы к температурным отклонениям.
Опорный линейный сигнал
Двумя наиболее важными параметрами опорного сигнала, которые могут вызывать ошибки, являются следующие.
– Нелинейность, из-за которой возникает изменение ширины импульса, представляющей амплитуду аудиосигнала.
– Джиттер тактового сигнала. Если период линейного сигнала изменяется, появляются временные расхождения между моментами, когда осуществляется выборка для сравнения с помощью компаратора. Усредненный результирующий сигнал смещается относительно истинного, т. е. происходит искажение.
Альтернативой компаратору является АЦП. Следует иметь в виду, что он вносит собственный фазовый шум и шум квантования, а также чувствителен к отклонениям опорного напряжения, которое задает размах сигнала.
Рисунок 3
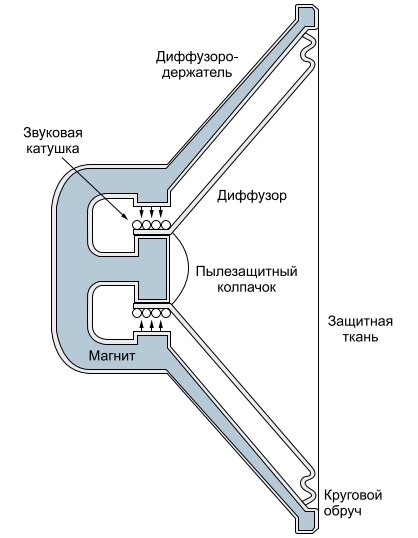
Строение электродинамического динамика
Рисунок 4
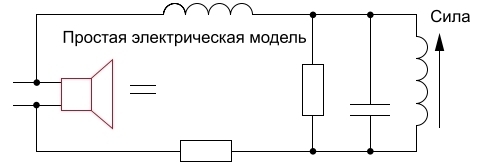
Упрощенная электрическая модель динамика
Принцип работы динамика
Мы рассмотрим только электродинамические динамики. В общем случае динамик представляет собой линейный электродвигатель или сердечник (см. рис. 3). Протекающий через него ток создает магнитное поле, сила которого направлена противоположно постоянному магнитному полю. Под действием этой силы происходит механическое перемещение частей динамика. Поскольку диффузор удерживается в нейтральном положении, для его перемещений требуется энергия.
Таким образом, движение динамика описывается законами Ньютона; вынуждающей силой является магнитное поле внутри сердечника. Эта сила пропорциональна произведению тока на количество витков из расчета на единицу длины.
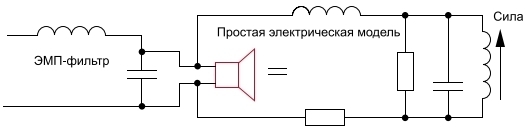
На рисунке 4 показана упрощенная электрическая схема динамика. Ток обеспечивает силу, приводящую мембрану в движение. В этой модели наглядно показано, что управление работой динамика осуществляется именно с помощью тока, а не напряжения.
Фильтр электромагнитных помех, установленный между усилителем и динамиком, может вносить дополнительные помехи и искажения, создавая неоднозначную нагрузку. На рисунке 5 показана модель динамика с фильтром электромагнитных помех. В ней учтено сложное отношение между средним напряжением и магнитной силой, используемой для нагнетания воздуха в прямом и обратном направлениях. На практике эта схема работает хорошо только потому, что импедансы компонентов фильтра и паразитных элементов, включенные последовательно, сравнительно малы, а включенные параллельно – высоки.
Тем не менее сигнал задерживается при прохождении через цепи. Если задержки на разных частотах различаются, в выходном сигнале появляются недопустимые искажения.
Рисунок 5
Упрощенная электрическая модель динамика с фильтром электромагнитных помех
Токовая обратная связь
При использовании токовой ОС (см. рис. 6) повышается точность управления током сердечника, формирующим вынуждающее воздействие на подвижные части динамика. задержка прохождения токового сигнала за счет обратной связи по току значительно меньше, чем сигнала напряжения с обратной связью по напряжению.
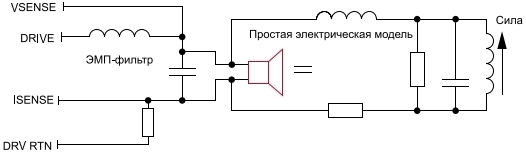
На рисунке 7 показана схема с двумя ОС (по току и по напряжению). Она позволяет сократить задержки, однако для ее работы требуется установить датчик положения сердечника, что приведет к увеличению потребляемой мощности. В случаях, когда это нежелательно, следует обходиться без ОС по напряжению.
Рисунок 6
Рисунок 7
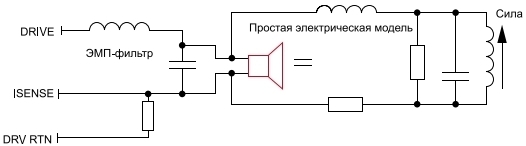
Использование токочувствительной цепи для управления динамиком
Использование сигнала тока и напряжения для управления динамиком
Усилитель с токовым направлением
Если характеристики схемы при работе с сигналом напряжения такие же, как при использовании сигнала тока, токовый режим управления динамиком проще и обеспечивает более высокую точность.
На рисунке 8 показано, как используется гистерезис для обеспечения токовой ОС. Выходной ток меняется на несущей частоте вблизи среднего значения, которое представляет собой исходный звуковой сигнал (см. рис. 9).
Результирующая частота несущей (80 кГц на рисунке 9) определяется суммой задержек от фильтра электромагнитных помех, импеданса динамика и схемы усреднения, а также соотношением между коэффициентом усиления тока и уровнем гистерезиса, который задается резисторами в цепи положительной ОС на звуковом входе.
Точность уровней переключения гистерезиса неважна, однако она должна удерживаться на уровне около 0,1% от максимального тока или предела перегрузки (1 мА/А), поскольку сигнал ОС представляет собой усредненное значение тока через динамик.
Рисунок 8
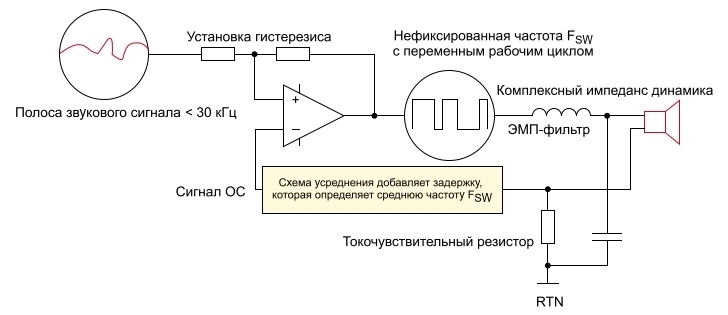
Использование гистерезиса для управления динамиком
Рисунок 9
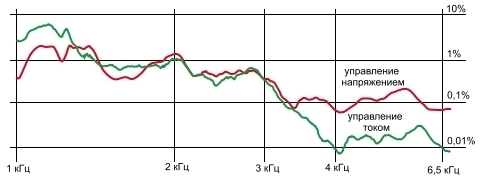
Рисунок 10

Дискретизованный синусоидальный сигнал 2,5 кГц на средней несущей частоте 80 кГц
Экспериментально полученные гармонические искажения 3-го порядка при управлении током и напряжением
Выводы
К числу преимуществ гистерезисного управления относится уменьшение ошибок, возникающих за счет задержки переключения компаратора, поскольку они компенсируются обратной связью по току. Кроме того, опорный линейный сигнал исключается, что приводит к сокращению числа источников ошибки.
Схема с гистерезисным управлением может работать при постоянном или низкочастотном сигнале, не допуская перегрузки и внося малое смещение постоянной составляющей.
На рисунке 10 показаны результаты моделирования нагрузки динамика (см. схему динамика на рисунке 7). Нагрузка динамика отслеживает протекающий через сердечник ток и генерирует магнитную силу, задающую воздушный поток через мембрану. На низких частотах схемы имеют примерно одинаковый уровень искажений.
Видно, что комплексный импеданс динамика влияет на гармоники 3-го порядка и, согласно результатам измерений, при высоких частотах искажения на порядок слабее в случае, когда управление динамиком осуществляется с помощью токового сигнала.
Мы показали, что динамики с токовым управлением обеспечивают более высокую точность, защищают от перегрузки, имеют простую схему и меньше стоят.
Корзина пуста
0
шт.
/
$0
Оформить
Очистить