- 8 (812) 612-97-27
- СПБ, Курчатова дом 1А помещение 1Н
- order@das-elektro.de

На рынке растет спрос на приложения, работающие по технологии Power over Ethernet (PoE). Небольшие устройства с малым энергопотреблением все чаще оснащаются функцией PoE. В статье рассматриваются вопросы реализации PoE‑технологии в сетях 10/100 Ethernet и Gigabit Ethernet, пример решения для видеокамер в системе машинного зрения, а также основные вопросы проектирования PSE‑систем и их решение.
Введение
Машинное зрение получает все большее распространение в системах промышленной автоматизации. Видеокамеры не только считывают коды, но и определяют объекты, осуществляют испытания качества и управление производственными процессами. Благодаря двум последним функциям появилась идея установить 100% технический контроль над производственными линиями [1].
Видеокамера системы машинного зрения обеспечивает «сырое» изображение объектов. Большинство видеокамер выпускается в очень малом формате (29×29×29 мм) со всей необходимой электроникой, включая интерфейсы, в небольшом корпусе [2]. КМОП-датчики, которые применяются в таких видеокамерах, очень чувствительны к теплу. Поскольку качество изображения ухудшается с ростом температуры, необходимо, чтобы рассеиваемая мощность была мала. Компактный корпус, в котором отсутствует место для вентилятора или теплового радиатора, не позволяет рассеивать мощность в больших объемах, и потому ее величина крайне ограничена.
В системах машинного зрения используются КМОП-датчики, ПЛИС или процессор, а также высокоскоростной интерфейс и источник питания. Электронная система должна захватывать, обрабатывать и передавать несжатые видеокадры с высокой скоростью и разрешением. Часто интерфейс работает на максимальной скорости, что становится ограничивающим фактором. К стандартным интерфейсам относятся USB 3.x, Gigabit Ethernet (GigE) или даже 10-Gigabit Ethernet. Оба Gigabit интерфейса, как правило, оснащены технологией PoE. Gigabit Ethernet обеспечивает высокую скорость передачи данных и питание по кабелю длиной до 100 м.
Датчик изображения отличается от видеокамеры тем, что в него интегрирован блок обработки данных. Требования к размерам и потребляемой мощности этими датчиками менее жесткие. Эти устройства имеют достаточно большие размеры и могут даже оснащаться теплоотводом. В состав датчика изображения также входит контроллер для управления освещением [3] и мощный процессор. Поскольку выходные данные в таком случае обрабатываются быстрее, чем «сырое» изображение, их скорость, как правило, ниже. Несмотря на то, что датчики изображения работают в сетях 10/100 Ethernet с промышленными протоколами, применяется также технология PoE.
Рисунок 1
Рисунок 2
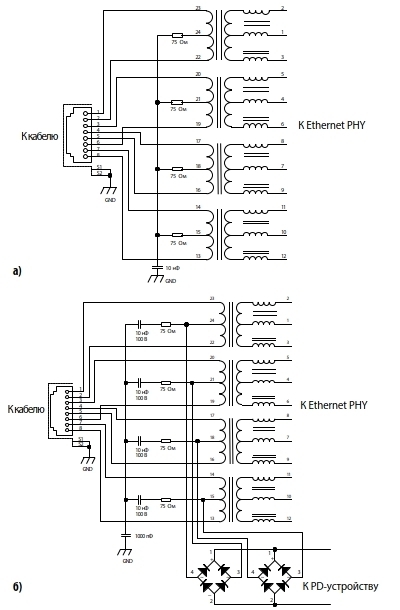
Схема электроавтоматики: а) без использования PoE; б) с функцией PoE
Обнаружение и классификация
Таблица 1
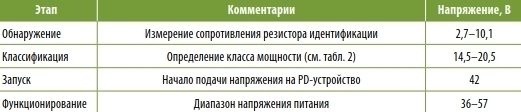
Режимы потребления мощности в соответствии со стандартом IEEE 802.3af
Таблица 2
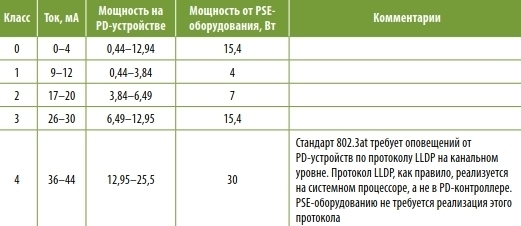
Классы мощности
Основные PoE
Для оснащения Ethernet системы функцией PoE требуется осуществить несколько модификаций [4]. На рисунке 1а показано, как трансформаторы обычно подключаются к сети Gigabit Ethernet в приложении без функции PoE. Средние выводы этих трансформаторов соединяются друг с другом через 75-Ом резисторы и заземляются через конденсатор. Такая схема называется сопряжением по методу Роберта Смита. В рассматриваемом случае землей, как правило, является корпус устройства или экран кабеля. Как видно из рисунка 1а, в такой схеме отсутствует возможность подавать питание устройству по Ethernet-кабелю.
Для реализации возможности подавать питание в схему добавляется по одному конденсатору на ответвление от средней точки, чтобы убрать постоянную составляющую. Поскольку этот тракт больше не закорочен, напряжение постоянного тока прилагается симметрично между каждой дифференциальной парой. В общей сложности, можно реализовать до четырех пар витого кабеля. Эти пары соединяются с контроллером запитываемого устройства (powered-device, PD) по двум выпрямительным мостам. При использовании выпрямителя полярность не имеет значения (см. рис. 1б).
Перед подачей питания питающее оборудование (PSE) должно убедиться в подключении к сети питаемого устройства, работающего по технологии PoE, чтобы не повредить его. На рынке предлагается несколько пассивных PoE реализаций, когда источник питания подключается к среднему ответвлению трансформатора, не используя функцию обнаружения. Такой подход, предназначенный для питания PoE PD, может стать причиной повреждения других устройств.
Обнаружение PD-Устройств
PSE-оборудование определяет подключение PD-устройства к сети. В 2003 г. стандарт IEEE 802.3af определил способ обнаружения и вид классификации, ограничив питание величиной 15,4 Вт на выходе PSE-оборудования. В 2009 г. стандарт IEEE 802.3at повысил это значение до 30 Вт. Данный стандарт не только определяет процедуру оповещения оборудования об уровне подаваемой мощности, но и протокол канального уровня.
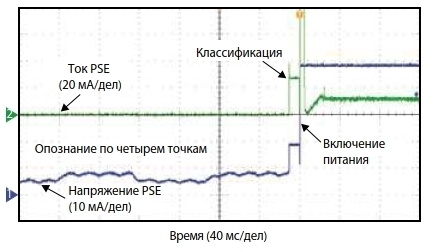
При подключении PD-устройства к PSE-оборудованию оно сначала осуществляет опознание. На данном этапе на PD-устройство подается напряжение в диапазоне 2,7–10,1 В, чтобы измерить ток на резисторе идентификации (сигнатуры). На рисунке 2 показана полная процедура обнаружения PD-устройств, совместимых со стандартом IEEE 802.3af Class 3. Обнаружение резистора идентификации (в диапазоне 19–26,5 кОм) осуществляется в четыре этапа, что обеспечивает надежность этой процедуры.
После корректного опознания начинается классификация. PSE - оборудование повышает напряжение в диапазоне 15,5–20,5 В, после чего PD-устройство начинает потреблять постоянный ток, сигнализируя о своих потребностях в питании. Например, ток 0 мА по классификации относится к разряду Class 0, что соответствует мощности 15,4 Вт, поступающей от PSE оборудования.
На начальном этапе (см. рис. 2) напряжение подается в диапазоне 5–8 В; в течение этого времени определяется сигнатура. После успешного завершения этой процедуры напряжение увеличивается до 19 В, а PD-устройство потребляет ток 28 мА. PSE-оборудование, получив информацию о подключении устройства Class 3, обеспечит мощность до 15,4 Вт. устройствам type 1 PSE-оборудование подает напряжение в максимальном диапазоне 44–57 В.
Описанная процедура расширена для устройств стандарта IEEE 802.3at. Первая классификация осуществляется для устройств Class 4 IEEE 802.at с сигналами тока 36–44 мА, после чего необходима вторая классификация. Мощность устройств этого класса достигает 30 Вт [5]. В таблице 1 перечислены режимы потребления мощности, а в таблице 2 представлен список категорий и значений тока.
Отличия сетей 10/100 Ethernet от Gigabit Ethernet
В сетях 10/100 Ethernet и Gigabit Ethernet используются совершенно разные кабели и оповещения. Как правило, Ethernet состоит из двух основных групп: скорость передачи данных в сетях 10/100 Ethernet составляет 10 и 100 Мбит/с, а в сетях Gigabit Ethernet – 1000 Мбит/с.
В технологии 10/100 Ethernet используются только четыре линии с кабелями и двумя разными каналами: один работает на передачу, другой – на прием. Для передачи сигналов с двумя разными скоростями требуется изоляция в виде трансформатора в передающей и принимающей линиях передачи на обоих концах кабеля. Таким образом, как правило, используются два трансформатора в одном корпусе. Для передачи на скорости 10 Мбит/с в соответствии со стандартом IEEE 802.3i 10BASE-T при кодировании сигналов применяется манчестерский код, а для передачи со скоростью 100 Мбит/с согласно IEEE 802.3u 100BASE-TX – линейное кодирование.
Gigabit Ethernet, или 1000-Мбит/с Ethernet, – другое название стандарта 802.3ab 1000BASE-T. Физический уровень Gigabit Ethernet – совершенно иной. Все восемь линий кабеля используются для реализации четырех дифференциальных каналов, и все одновременно являются двунаправленными. Потребность в изоляции и трансформаторах та же, что и в случае с 10/100 Ethernet: каждой паре требуется один трансформатор. В общей сложности, на каждом конце кабеля применяются четыре трансформатора. Поскольку интегральные трансформаторы для Gigabit Ethernet состоят из четырех трансформаторов, их размеры, как правило, больше размеров трансформаторов для линий 10/100 Ethernet. В приложениях, критичных к занимаемому пространству, можно использовать два трансформатора 10/100-Ethernet для Gigabit Ethernet.
PoE в системах 10/100 Ethernet
Выше мы обсудили, как реализуется PoE-технология в сетях Gigabit Ethernet с помощью четырех пар. PD-устройства используют все пары для работы с модификациями PSE-оборудования A и B. Поскольку в сетях Ethernet со скоростями 10/100 используются только две пары, незадействованными остаются две другие пары.
Эти две пары (выводы 7/8 и 4/5 разъема RJ45) часто применяются только для реализации PoE-технологии. Недостаток такого подхода в том, что требуется кабель с восемью линиями. Если по какой-либо причине требуется кабель с четырьмя линиями, мощность следует инжектировать симметрично в пары линий данных в трансформаторы. В таком случае используется тот же метод, что и для сетей Gigabit Ethernet.
Для оповещений стандарт 802.3at требует от PD-устройств применения протокола LLDP канального уровня. Как правило, он реализуется в системном процессоре, а не в PD-контроллере. Для работы PSE-оборудования протокол LLDP не требуется.
На рисунке 3 представлена реализация PoE PD устройств в сетях 10/100 Ethernet. Как и в случае с Gigabit Ethernet, все четыре линии соединены с PD-контроллером через выпрямительный мост. Эта схема обеспечивает питание устройства независимо от его полярности. Она работает при добавлении линий питания к линиям данных или незанятым линиям.
Рисунок 3
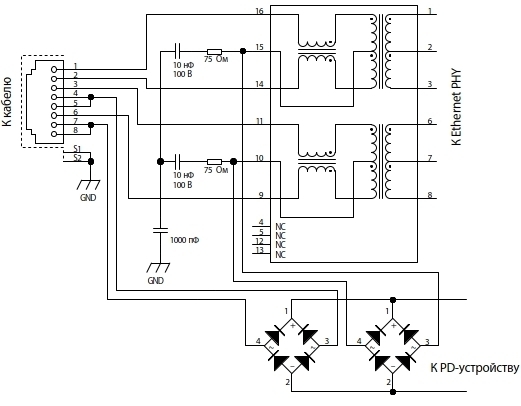
Технология PoE для сетей 10/100 Ethernet
Пример компактного решения для видеокамер систем машинного зрения
Как уже упоминалось, в системах машинного зрения используютс я очень компактные видеокамеры, что в значительной мере ограничивает энергопотребление. Реализация технологии PoE в сетях Gigabit Ethernet в таких случаях требует высокого уровня интеграции. Для установки печатной платы в корпус размером 29×29×29 необходимо, чтобы ее размер не превышал 25×27 мм. Благодаря малому размеру систему можно разделить на небольшие подсистемы по нескольким разным платам. На рисунке 4 показано полное решение, в котором реализован интерфейс питания и данных для видеокамер в системах машинного зрения и других PoE-приложениях с ограниченным занимаемым пространством.
В состав исходного проекта с изолированными блоками PoE и GigE для видеокамер и датчиков изображения систем машинного зрения входят две небольшие печатные платы, соединенные посередине гибкой печатной платой (см. рис. 4). На печатной плате слева имеются разъемы, преобразователь данных и каналы входа/выхода. На печатной плате справа реализовано PoE-решение и физический уровень Gigabit Ethernet, включая генератор тактовых сигналов и источник питания. Посередине между двумя платами находится печатная плата, которую можно изогнуть, чтобы установить конструкцию в корпус.
Чтобы размер решения был небольшим, в исходном проекте применяется интегральная ИС (TPS23758), оснащенная функциями отдельного PD-контроллера, обратноходового контроллера и полевого транзистора. Наличие обратной связи (ОС) на первичной стороне исключает необходимость в использовании ОС оптопары. В результате конструкция имеет сравнительно малый размер и более высокую надежность, а стабилизация напряжения осуществляется быстрее.
Величина рассеиваемой мощности является критичным показателем для приложений этого типа, определяя выбор выпрямителя на вторичной стороне. Наряду с обратной связью на первичной стороне диод позволяет определить температуру по падению напряжения на нем. В большинстве приложений этот фактор не является критичным, но в тех случаях, когда обратноходовая схема рассчитана на 5 В и требуется подать 5,5 В на управляющую ИС по управлению питанием (PMIC), выброс напряжения при малом токе может доставить неприятности разработчику.
Обе проблемы (уменьшение падения напряжения, зависящее от температуры и тока, а также рассеяние мощности) можно решить, заменив диод полевым транзистором и добавив обмотку в трансформатор для управления этим транзистором. Синхронное выпрямление побуждает стабилизатор работать в режиме непрерывной проводимости даже при малых нагрузках, благодаря чему уровень выходного напряжения остается прежним при малых нагрузочных токах. Поскольку у полевого транзистора намного меньше потери на проводимость, чем у диода, рассеиваемая мощность уменьшается.
Изменение напряжения, зависящее от температуры и тока, становится значительно меньше по сравнению с диодом, что позволяет полевому транзистору подавать питание непосредственно на PMIC.
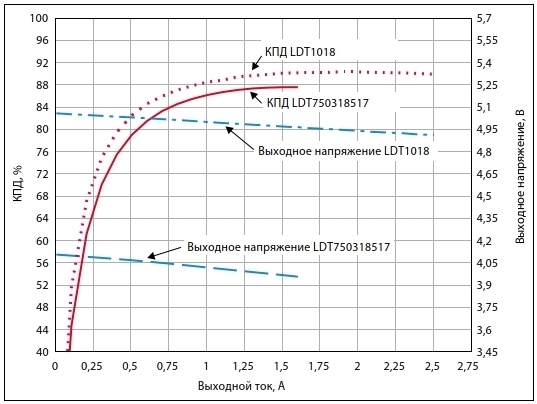
На рисунке 5 показаны графики КПД и выходного напряжения контроллера TPS23758 с двумя разными трансформаторами. Один из них рассчитан на выходную мощность 7 Вт при 4 В, а другой – на 13 Вт при 5 В.
Итак, PoE-технология – простой и эффективный способ комбинировать подачу питания и высокоскоростную передачу данных по одному кабелю. При реализации PoE имеются важные различия между сетями 10/100 Ethernet и Gigabit Ethernet. Чтобы отличить PoE- устройство от тех устройств, которые не поддерживают эту технологию, следует корректно осуществить распознание. Оповещение о необходимости получить питание от PSE-оборудования является необходимой процедурой.
Пример реализации решения очень малого размера, приведенный на рисунке 4, показал, что PoE-интерфейс обеспечивает мощность величиной 7 или 13 Вт при очень высоком КПД около 90% (см. рис. 5).
Рисунок 4
Рисунок 5
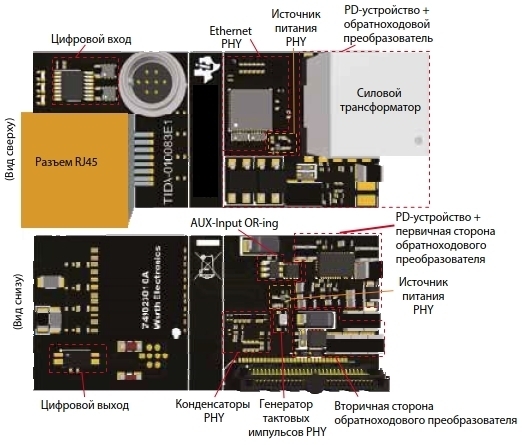
Исходный проект TIDA-010083E1 для PoE-изолированных видеокамер и датчиков в системе машинного зрения GigE
КПД PoE-решения с использованием контроллера TPS23758 и двух разных трансформаторов
Структурная схема PoE-Системы
На рисунке 6 показана структурная схема самой распространенной PoE- системы. Микроконтроллер управляет PSE-оборудованием по интерфейсу I2C и связывается с центральным обрабатывающим модулем хоста по интерфейсам I2C, SPI или UART. Источник постоянного тока (44–57 В) подает питание на плату PSE и в PD-нагрузку по кабелям Ethernet.
Проблемы проетировния PSE-Систем
К техническим проблемам, возникающим при проектировании PSE-оборудования для PoE-систем, относятся следующие.
– Управление питанием порта. у коммутатора Ethernet, как правило, – несколько портов (16, 24 или 48), но источник питания не в состоянии обеспечить полную мощность для всех портов. Например, в 48-портовой конфигурации потребляемая мощность каждой нагрузки, подключенной к порту, достигает 30 Вт. Следовательно, в общей сложности PSE- оборудованию требуется 1440 Вт. Однако большинство производителей предпочитает экономить на поставках систем с источниками питания по переменному току, подающими всю требуемую мощность на всех портах. Таким образом, возникает вопрос об обеспечении питания как можно большего количества PD-устройств и сохранении питания высокоприоритетных портов в случае дефицита мощности.
– Ступенчатое изменение нагрузки. Известно множество способов управлять изменениями нагрузки с помощью соответствующих портов. Наиболее распространенный из них метод основан на динамическом контроле над потребляемой мощностью каждого порта. Это эффективный метод, поскольку его применение не вызывает потерь энергии. Информация о потребляемой мощности в режиме реального времени при осуществлении динамического управления питанием позволяет рассчитать оставшийся заряд батареи и принять решение о включении питания. ПО для PSE оборудования использует динамический контроль, позволяющий получать сведения о суммарной потребляемой мощности, для чего на всех портах считываются показания тока и напряжения.
В системе с большим количеством портов расчет суммарной потребляемой мощности с помощью динамического контроля требует много времени. Например, предположим, что для связи между PSE оборудованием и микроконтроллером применяется коммуникационный протокол I2C (4 0 0 кГц ). Для расчета мощности, приходящейся на один порт, считываются показания двух регистров для тока и двух регистров для напряжения. Для считывания информации о напряжении на одном порту требуются пять транзакций I2C, что занимает 1/400 кГц ∙ 9 бит ∙ 5 = 0,11 мс. В общей сложности, необходимы 0,22 мс для расчета мощности на одном порту. Теоретически, на один цикл расчетов уходят 0,22 мс ∙ 96 каналов = 21,12 мс.
На рисунке 7 представлены экспериментальные данные для шины I2C. На считывание напряжения потребовались 0,1447 мс и еще 0,1447 мс – на считывание тока, что в сумме дает 0,2894 мс; при этом необходимо некоторое время на сохранение данных и включение регистров. В случае 96-канальной системы потребуются, по крайней мере, 27,7824 мс на операцию считывания.
– Несколько источников питания. В некоторых системах применяется несколько источников питания по переменному току. В одних случаях они работают сообща, чтобы обеспечить требуемую суммарную мощность, а в других дополнительный источник используется в качестве резервного. В обоих случаях следует учитывать возможность того, что один из источников питания может прекратить функционировать или временно перейдет в автономный режим. При этом необходимо быстро отключить порты с малым приоритетом во избежание перегрузки источника питания.
Рисунок 6
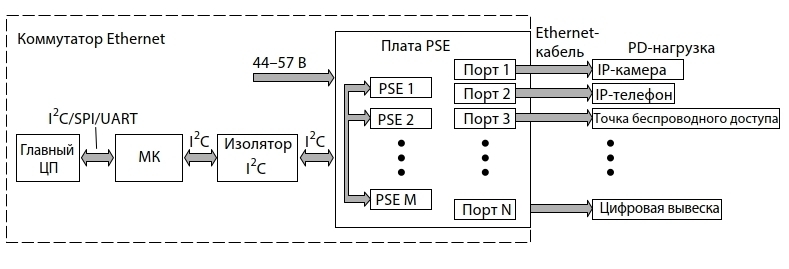
Структурная схема PoE-системы
Рисунок 7

Временная диаграмма для расчета тока, протекающего через один порт
Рисунок 8
Рисунок 9
Методологии управления питанием
PSE-система с несколькими источниками питания
Решения для PSE-Систем
Давайте рассмотрим решения каждой из трех упомянутых задач при проектировании PSE-оборудования.
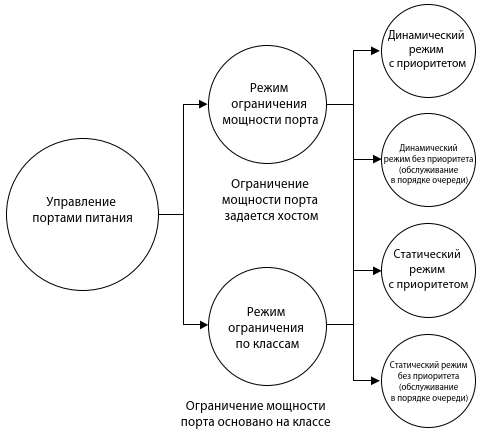
– Управление портами питания. Как упоминалось, управление портами питания необходимо для обеспечения питанием как можно большего количества PD-устройств; при этом суммарное энергопотребление не должно превышать допустимого уровня, а циклы переключения мощности этих устройств ограничены. Как видно из рисунка 8, мощностью порта можно управлять, ограничив уровень класса или заранее установив предельные значения мощности.
При динамическом управлении для расчета оставшейся мощности используется фактическое значение потребляемой энергии, а в статическом режиме – предельное значение мощности из расчета на порт. Например, если общий бюджет мощности системы равен 100 Вт, класс PD-устройства можно ограничить. При использовании PD-устройства Class 4, когда величина максимальной потребляемой мощности достигает 30 Вт, на один работающий порт приходятся 20 Вт. В динамическом режиме величина оставшейся мощности составила бы 100 Вт – 20 Вт = 80 Вт. В статическом режиме эта величина равнялась бы 100 Вт – 30 Вт = 70 Вт. Существуют два способа приоритезации портов: 1) приоритет определяется пользователем; 2) обслуживание осуществляется в порядке очереди.
– Ступенчатое изменение нагрузки. Мощность PSE-оборудования можно измерить с помощью внешней измерительной схемы на входе системы, не считывая значений напряжения и тока на отдельных портах из регистра PSE. Микроконтроллер может быстро выключить порты с низким приоритетом во избежание перегрузки источника питания, что сократит задержку системы. МК непрерывно считывает показании АЦП и контролирует общее потребление поступающей мощности. Несмотря на то, что время реакции системы определяется частотой выборки АЦП, преобразователь можно регулировать в соответствии с разными требованиями.
В условиях перегрузки микроконтроллер в соответствии с расчетными данными отключает порты с низким приоритетом, чтобы сохранить энергопотребление в пределах выделенного бюджета мощности, позволяя избежать повторной загрузки системы . В отсутствие перегрузки МК постепенно наращивает мощность на отключенных портах, если это позволяет бюджет.
В другом методе по управлению питанием применяется компаратор, который генерирует ступенчатый сигнал напряжения, если ток перегрузки соответствует заданному пороговому значению. Сигнал подается на порты ввода/вывода общего назначения МК, который выдает аппаратное прерывание и быстро выключает порты. И в этом случае, когда условия перегрузки устранены, МК постепенно наращивает мощность на отключенных портах, если это позволяет бюджет. В результате задержка системы сокращается со 127 мс до менее чем 1 мс.
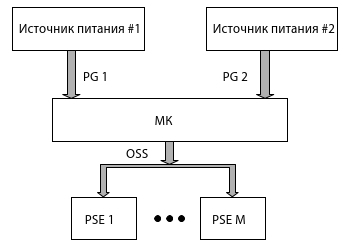
– Несколько источников питания. Решение заключается в подаче PG-сигналов (power-good) источников питания на выводы аппаратного прерывания МК. Микроконтроллер назначает разные приоритеты быстрого выключения разным портам на основе бюджета питания. В случае нарушения функционирования одного источника питания МК отправляет заранее определенные сигналы быстрого отключения (OSS) в PSE-систему и отключает порты с низким приоритетом во избежание перегрузки источника питания. Испытания показали, что МК может отключить эти порты менее чем за 200 мкс.
На рисунке 9 показана структурная схема PSE-системы с двумя источниками питания. Каждый из них имеет возможность отправить микроконтроллеру сигнал индикации PG в качестве прерывания.
Итак, самые трудные вопросы проектирования PSE-системы всегда связаны с обеспечением управления питанием, поскольку источники питания, как правило, не рассчитаны на работу с полной мощностью в силу недостаточного размера и высокой стоимости. Поскольку решение проблем проектирования системы на уровне интегральных схем может оказаться дорогостоящим, имеются другие более экономичные решения с использованием системного ПО.
Конфигурация систем с помощью ЦП, интерфейсов I2C или UART позволяет существенно сократить цикл проектирования и уменьшить расходы.
Корзина пуста
0
шт.
/
$0
Оформить
Очистить