- 8 (812) 612-97-27
- Санкт-петербург, Курчатова 10М Офис 15
- das elektro
- order@das-elektro.de

В статье на практических примерах описаны методы оцифровки и захвата сигналов, в т. ч. цифрового преобразования с понижением частоты с помощью широкополосных 8-разрядных дигитайзеров. Кроме того, приводятся результаты испытаний, и даются рекомендации.
Введение
Возможность пилота уклониться от ракетной атаки исчисляется секундами, проходящими с момента обнаружения и идентификации вражеской ракеты до момента создания помехи самолетной системой активного радиоподавления. Уверенность разработчика в надежной работе системы активного радиоподавления основана, помимо прочего, на возможности захвата соответствующих ВЧ-сигналов с помощью измерительного оборудования с достаточным динамическим диапазоном, мгновенной полосой пропускания и временем захвата для проверки взаимодействия сигнала РЛС с сигналом помехи, выполняемой зачастую в лабораторных условиях. В статье описываются методы оцифровки сигналов, включая захват сигнала без обработки и несколько методов захвата с цифровым понижающим преобразованием частоты (DDC), а также оцениваются ключевые компромиссные решения по динамическому диапазону, полосе пропускания и времени захвата при выполнении важных контрольных измерений.
Срыв строб импульса дальности (RGPO)
Один из широко применяемых методов создания помехи называется срывом строб-импульса дальности (RGPO). Идея заключается в том, чтобы система активного радиоподавления, установленная на борту самолета, обнаруживала отслеживающие импульсы РЛС противника и отправляла в ответ импульсы помех. Целью в этом случае является противодействие РЛС в отслеживании расстояния до цели, что не позволит произвести прицельный пуск ракеты «земля–воздух». Если ракета все же была запущена, то необходимо заставить РЛС прервать отслеживание расстояния так, чтобы ракета отклонилась от курса на цель и не причинила вреда самолету. Система RGPO генерирует мощные импульсы помех, которые в приемнике РЛС накладываются поверх отраженных сигналов. затем эти ложные импульсы сдвигаются относительно реальных отраженных импульсов РЛС, вынуждая систему отслеживать импульсы помех, а не реальный отраженный от цели сигнал. После этого импульсы помех исчезают, и РЛС теряет информацию о расстоянии. Пример работы системы RGPO приведен на рисунке 1.
Рисунок 1
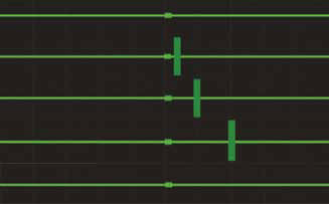
Мощные импульсы срыва строб-импульса дальности сдвигаются от слабых отраженных импульсов РЛС и затем исчезают
Параметры рлс ракеты класса "Земля-воздух"
Проектируя систему активного радиоподавления RGPO, следует учитывать некоторые параметры РЛС ракеты «земля–воздух», которые необходимы для эффективного электронного противодействия. В число этих параметров входят:
- ширина спектра модуляции ЛЧМ-импульса;
- частота несущей, которую можно скачкообразно перестраивать;
- период повторения импульсов (PRI) – может применяться размытие;
- длительность импульса;
- мощность передатчика;
- коэффициент усиления антенны по линии визирования.
Время полета ракеты и расстояние до цели могут значительно меняться в зависимости от конкретного сценария, но эти факторы тоже очень важны и должны учитываться. В качестве разумного приближения можно считать, что для прохождения 10 км ракете понадобится примерно 20 с. Именно этот сценарий и соответствующие измерения источника помех мы и будем рассматривать.
Уровень отраженных сигналов в приёмнике рлс
Важным этапом разработки системы RGPO является оценка предполагаемого уровня отраженных сигналов в приемнике РЛС и проектирование источника помех, который создает сигналы, превышающие по амплитуде этот уровень на 6–20 дБ.
В открытых источниках приводятся примеры вывода уравнения дальности РЛС и применения его для расчета уровней мощности отраженных сигналов. В этих расчетах приходится учитывать множество факторов, но для облегчения расчета уровня мощности сигнала в дБм можно использовать некоторые упрощенные уравнения.
В данном случае мы рассмотрим сигнал, возникающий при удалении цели от РЛС на 10 км при частоте несущей 3 ГГц, а затем используем типичные значения других, приведенных ниже параметров, взятые из открытых источников или полученные из других примеров. Такие расчеты, выполненные на основе типичных значений параметров, дают уровни мощности на входе приемника РЛС в диапазоне –65…–45 дБм.
Мощность отраженного сгнала

где S – мощность отраженного сигнала на входе приемника РЛС, дБм;
ERPR – эффективная излучаемая мощность РЛС в сторону цели;
R – расстояние от РЛС до цели, км;
F – рабо- чая частота РЛС, МГц;
σ – эффективная поверхность рассеяния цели, м2;
G – коэффициент усиления основного лепестка антенны РЛС, дБ.
заметим, что приведенное уравнение содержит константу –103, которая объединяет несколько коэффициентов преоб- разования, позволяя вводить данные в наиболее удобных единицах измерения.
Импульсы помех должны формироваться так, чтобы пре- вышался уровень отраженного сигнала на входе приемника РЛС на 20 дБ. Если отраженный сигнал на входе приемника РЛС имеет мощность –65 дБм, то мощность импульсов помех должна составлять –45 дБм.
Использование дигитайзера
Чтобы однозначно решить вопрос об использовании дигитайзера в ходе проверки источника помех, следует учесть компромиссы между выбором разных параметров системы, к которым относится полоса пропускания, чувствительность и время, в течение которого захватываются импульсы.
В данном сценарии помимо частоты несущей 3 ГГц, сигналы РЛС и источника помех имеют линейную частотную модуляцию (ЛЧМ) с шириной спектра 40 МГц, обладают длительностью 1 мкс, а период повторения импульсов (PRI) равен 10 кГц. При этом полезно наблюдать несколько циклов помех RGPO, когда ложные импульсы сдвигаются на величину строба дальности от реальных отраженных импульсов, а каждый цикл RGPO длится примерно 10 с.
Таким образом, необходимо уметь захватывать, наблюдать и анализировать отраженные импульсы РЛС и импульсы помех в том виде, в котором они будут присутствовать на входе приемника РЛС в течение около 60 с. Полоса модуляции, длительность импульса, PRI и полное время захвата являются именно теми параметрами, которые определяют способность дигитайзера измерять такие импульсы. Давайте рассмотрим компромиссы, возникающие при использовании в таком измерении широкополосного 8-разрядного дигитайзера.
Дигитайзер, структурная схема которого показана на рисунке 2, обеспечивает полосу пропускания, частоту дискретизации и вычислительную мощность ПЛИС, необходимые для понижающего преобразования частоты. Варьируя упомянутые параметры, мы попробуем получить необходимый нам интервал захвата 60 с.
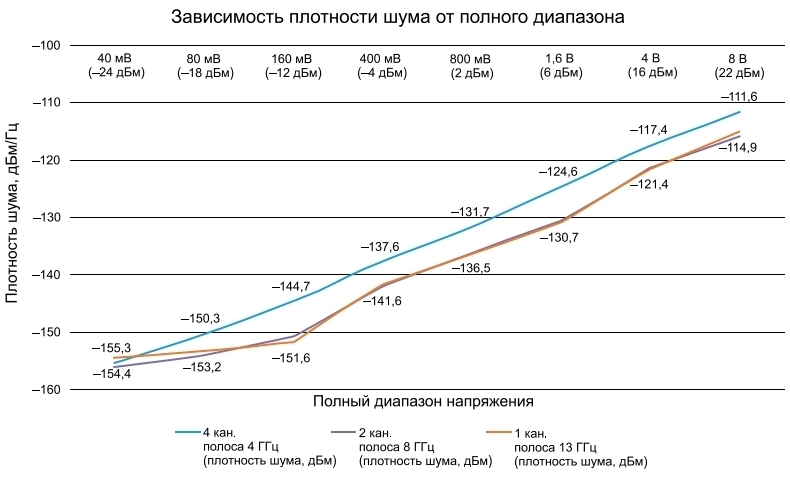
Другим ключевым параметром дигитайзера является плотность шума и соответствующая чувствительность, которую можно получить при использовании разных моделей дигитайзеров и режимов захвата. Работая в полном диапазоне частот, каждая модель дигитайзера обладает определенным среднеквадратичным уровнем шума для каждого значения чувствительности. Эти среднеквадратичные уровни шума можно преобразовать в уровни мощности в дБм, а затем нормировать на измерительную полосу 1 Гц с помощью следующего уравнения:

Это очень удобно, поскольку такую «плотность шума» в полосе 1 Гц можно легко преобразовать в уровень шума для любой заданной полосы измерения. Плотность шума для трех различных моделей дигитайзера показана на рисунке 3.
В нашем примере, где импульсы РЛС и источника помех имеют частоту несущей 3 ГГц и ширину спектра модуляции 40 МГц, для захвата сигнала можно использовать дигитайзер с полосой 4 ГГц. Поскольку необходимо измерять импульсы РЛС и импульсы помех, во избежание отсечки сигнала чувствительность следует выбрать так, чтобы входной диапазон превышал уровень импульсов помех –45 дБм. Это позволяет использовать полный размах сигнала 40 мВ с соответствующей плотностью шума –155,3 дБм/Гц.
Сначала преобразуем это значение в шум, который присутствовал бы при использовании полосы 4 ГГц. Будем исходить из следующего соотношения:
Шум, дБм (в полосе измерения) = плотность шума + 10lg (полоса измерения).
Рисунок 2
Рисунок 3
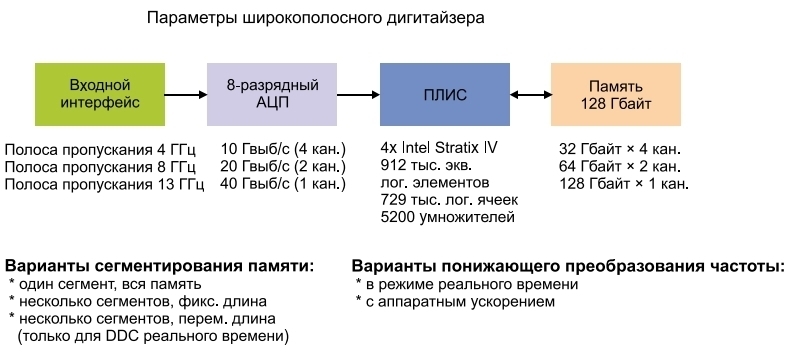
Структурная схема широкополосного 8-разрядного дигитайзера
Плотность шума для дигитайзеров с полосой пропускания 4, 8 и 13 ГГц
Пример
При полном размахе 40 мВ в системе с полосой пропускания 4 ГГц в полной полосе:
Шум, дБм (в полосе 4 ГГц) = –155,3 дБм + 10lg (4E+09) = –155,3 дБм + 96 дБ = –59,3 дБм.
Итак, в полной полосе 4 ГГц уровень шума превышает уровень отраженных импульсов РЛС –65 дБм. В этот момент в игру и вступает цифровое понижение частоты. Поскольку ширина спектра импульса ЛЧМ равна всего 40 МГц, можно использовать цифровое понижение частоты для сокращения полосы измерения до значения, немного превышающего полосу сигнала. 50 МГц вполне достаточно. Далее мы рассчитаем уровень шума в полосе измерения 50 МГц.
При полном размахе 8 мВ в системе с полосой пропускания 4 ГГц при установленной полосе обзора 50 МГц:
Шум, дБм (в полосе 50 МГц) = –155,3 дБм + 10lg (0,05E+09) = –155,3 дБм + 76,9 дБ = –78,4 дБм.
Теоретически шум станет меньше слабого отраженного сигнала РЛС с уровнем –65 дБм.
Для доказательства этого факта можно выполнить измерение. Отраженные импульсы РЛС и импульсы помех моделируются с помощью генератора сигналов произвольной формы, выходные сигналы которого поступают на широкополосные входы I/Q векторного генератора сигналов; при этом выполняются измерения в полной полосе 4 ГГц, а затем в полосе 50 МГц. Оба измерения показаны на рисунке 4.
Захват всех отраженных импульсов и импульсов помех в интервале 60 с
Эта возможность зависит от обстоятельств. Если использовать дигитайзер с полосой пропускания 4 ГГц и объемом памяти 30 Гбайт, работающий со скоростью 10 Гвыб/с, время захвата составит всего 3 с. Два ключевых способа позволяют увеличить продолжительность захвата импульсов – применение сегментированной памяти и цифрового понижающего преобразования частоты.
Технология RGPO использует импульсы помех, которые сдвигаются относительно отраженных импульсов РЛС в течение примерно 10 с и затем исчезают на несколько секунд, пока РЛС снова не зафиксирует расстояние. затем источник помех включается снова, уводя импульсы помех от отраженных импульсов РЛС. Используя режим захвата, или режим сегментированной памяти, в котором захват начинается по событию запуска и выполняется в течение фиксированного интервала времени, можно захватывать импульсы РЛС и импульсы помех в процессе их взаимодействия и отключать захват на длительный период времени в отсутствие импульсов в течение 100 мкс периода PRI.
При частоте дискретизации 10 Гвыб/с с интервалом между выборками 100 пс и при наличии 15/16 от общего объема доступной памяти 32 Гбайт можно видеть, что:
Число сегментов = (30 Гбайт/10 Гвыб/с)/(12 мкс/сегмент) = 250000, время = 250000 сегментов ∙ 100 мкс PRI = 25 с.
за 25 с можно увидеть пару циклов RGPO, но не желаемые 60 с взаимодействия. К тому же, в полной полосе 4 ГГц имеется проблема большого уровня шумов. На рисунке 5 показан захват с использованием сегментированной памяти с сегментами длиной 12 мкс, но с входными сигналами значительно большей амплитуды, чем представлялось, что типично для отраженных импульсов РЛС и импульсов помех. Если сигналы на входе приемника РЛС имеют типовые уровни, то шум дигитайзера скроет слабые отраженные сигналы РЛС.
Однако теперь для сужения полосы можно использовать метод DDC реального времени, что не только уменьшает шум, но и существенно повышает степень утилизации памяти за счет сохранения данных I и Q с существенно меньшей частотой дискретизации по сравнению с исходной частотой 10 Гвыб/с.
Мы хотим получить мгновенную полосу захвата 50 МГц (для захвата сигнала с шириной спектра 40 МГц).
Данные, захваченные с частотой дискретизации 10 Гвыб/с, мгновенно обрабатываются в ПЛИС и преобразуются в данные I и Q с частотой дискретизации 62,5 Мвыб/с в каждом канале (125 Мвыб/с в сумме). В результате получаются пары значений I и Q, разнесенные по времени на 16 нс. Время захвата можно рассчитать, зная, что в методе DDC реального времени для хранения выборок I/Q доступна половина памяти дигитайзера:
Время непрерывного захвата = ((1/2) ∙ (32E+09 выборок))/125E6 выборок/с = 128 с.
Рисунок 4
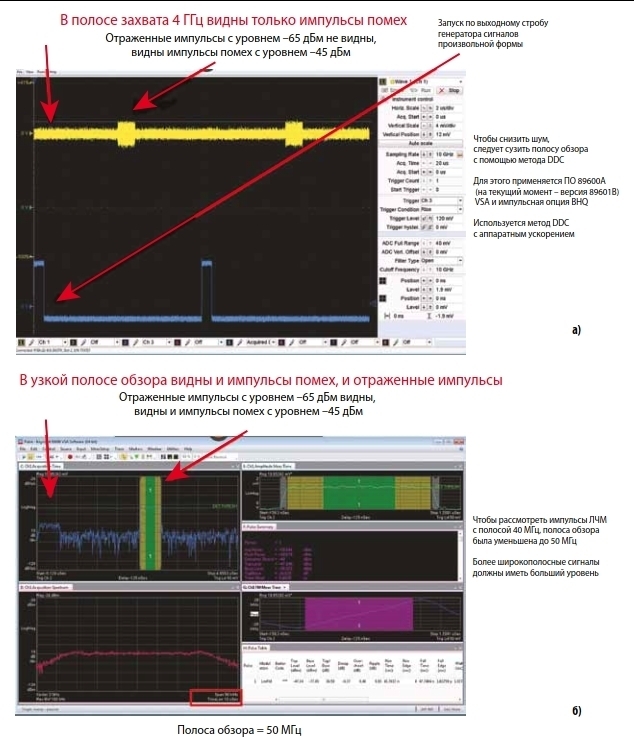
В полосе 4 ГГц отраженные импульсы РЛС не видны (а), но они видны в полосе 50 МГц (б)
Рисунок 5
Рисунок 6
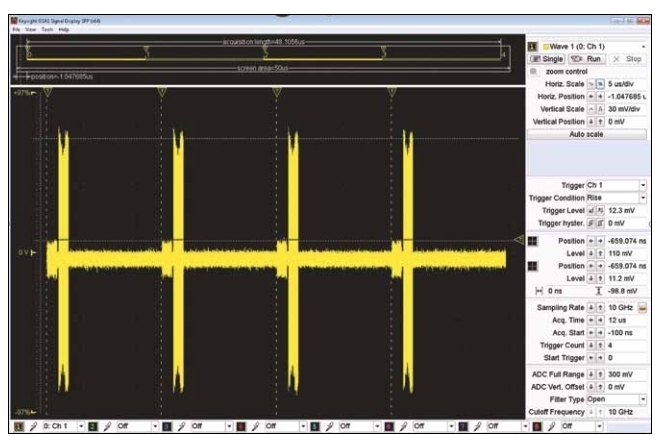
Захват без обработки с частотой дискретизации 10 Гвыб/с, выполненный сегментами по 12 мкс в полосе 4 ГГц
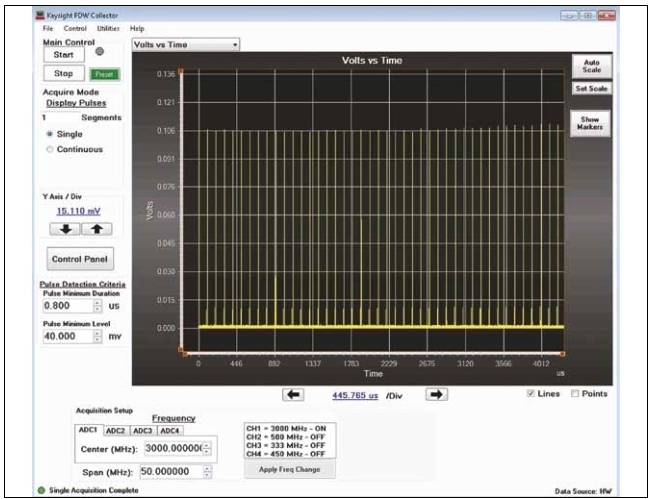
Захват одного сегмента с помощью метода DDC реального времени с полосой 50 МГц
Рисунок 7
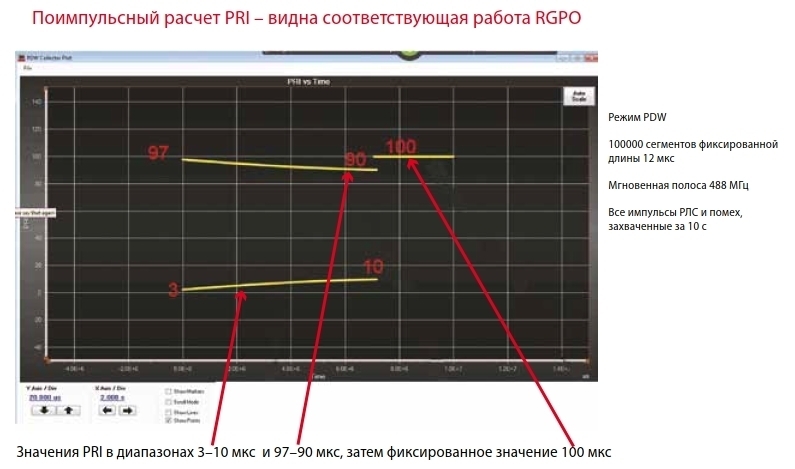
Проверенное правильное соотношение между импульсами РЛС и импульсами помех RGPO
захват с помощью DDC реального времени с полосой 50 МГц и одним сегментом длиной 400 мс показан на рисунке 6.
Новые РЛС используют импульсы ЛЧМ с более широким спектром. Если РЛС использует ЛЧМ шириной 450 МГц и полоса обзора соответствующим образом увеличивается, то время захвата уменьшается в пропорции 450 к 50, или примерно в 10 раз. В результате период захвата сокращается до 13 с. Используя метод DDC реального времени и сегментированную память, можно выполнить захват ВЧ-импульсов за требуемый период 60 с с мгновенной полосой до 488 МГц, что ограничивается, в первую очередь, вычислительной мощностью ПЛИС. На самом деле импульсы можно захватывать в течение 100 с:
Число сегментов = (1/2 ∙ 32 Гбайт/1,25 Гвыб/с)/(12 мкс/сегмент) = 12,8 с/(12 мкс/сегмент) = 1000000 сегментов.
Если PRI = 100 мкс, получим:
Полное время захвата импульсов = 1000000 сегментов ∙ 100 мкс/сегмент = 100 с.
Однако ничто не дается даром – в полосе обзора 488 МГц может оказаться трудно выделить слабые отраженные импульсы РЛС с уровнем –65 дБм из результирующего сильного шума. Измерение отраженных импульсов РЛС и импульсов помех показано на рисунке 7, где каждая пара импульсов РЛС/помех располагается в сегментах длительностью 12 мкс в интервале 10 с, а для проверки работы RGPO в течение этого времени на график нанесены также расчетные интервалы PRI. Для захвата всех импульсов за 10 с выбрано 100000 сегментов (100000 ∙ 100 мкс PRI = 10 с). На рисунке показана диаграмма расчетных значений PRI, причем результирующая кривая PRI изменяется примерно в пределах 3–10 мкс в нижней части графика по мере того, как импульсы помех сдвигаются от импульсов РЛС. затем, когда импульсы помех исчезают и остаются только импульсы РЛС, наблюдается фиксированный интервал PRI 100 мкс. Этот 10-с период захвата начинается вскоре после того, как импульсы РЛС и помех расходятся на несколько мкс.
Режим DDC реального времени имеет еще и то преимущество, что данные можно передавать потоком на внешний RAID- массив, в результате чего время захвата ограничивается лишь объемом используемого RAID-массива.
Таблица
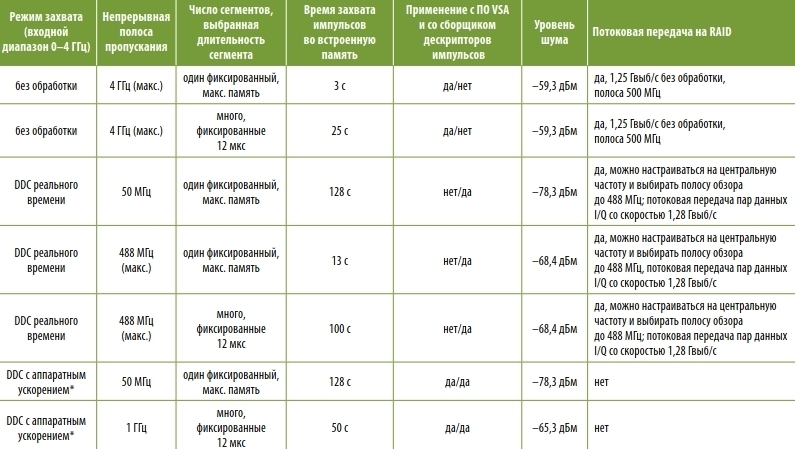
Перечень примеров и компромиссных решений
* Поддерживает диапазоны частот 0–8 ГГц и 0–13 ГГц в 2-канальных и 1-канальных моделях.
Применение метода DDC с аппаратным ускорением
Если спектр входных сигналов выходит за диапазон 0–4 ГГц 4-канального дигитайзера, использование режима DDC все еще допускается в моделях с полосой пропускания 8 и 13 ГГц с использованием аппаратного ускорения. Кроме того, DDC с аппаратным ускорением можно использовать в приложениях, где требуются измерения с мгновенной полосой шире 488 МГц (доступных в DDC реального времени). DDC с аппаратным ускорением можно использовать в дигитайзерах с полосами 4, 8 и 13 ГГц, причем этот режим предусматривает и большие полосы обзора до 1,9; 3,9 и 7,8 ГГц, соответственно. Кроме того, DDC с аппаратным ускорением можно применять для ускорения обработки сигнала при использовании ПО VSA. Недостатком DDC с аппаратным ускорением является невозможность передачи потока данных на RAID-массив, что ограничивает запись выборок I/Q объемом памяти дигитайзера.
Выводы
Широкополосные 8-разрядные дигитайзеры могут применяться для регистрации импульсов РЛС и помех в ходе проверки систем активного радиоподавления, а также для измерения других сигналов, применяемых в РЭБ. При этом приходится идти на компромисс между полосой измерения и общим временем захвата импульсов РЛС и помех. Этот компромисс влияет на уровень шума, присутствующего в измерениях, который, в свою очередь, определяет возможность захвата и анализа низкоуровневых сигналов, например отраженных импульсов РЛС. Сводка описанных примеров и компромиссных решений приведена в таблице (захват отраженных импульсов РЛС с уровнем – 65 дБм и импульсов помех с уровнем –45 дБм; RGPO = 10 мкс; PRI = 100 мкс с помощью 4-канального дигитайзера с полосой пропускания 4 ГГц). Комбинация метода DDC и сегментированной памяти играет очень важную роль в этих измерениях, выполняемых, как правило, в лабораторных условиях.
Мы увидели, как применяются некоторые инструменты при разработке систем активного радиоподавления для измерения сигналов РЛС и источника помех, чтобы установить их взаимодействие в процессе срыва строб-импульса дальности. Режим RGPO – всего лишь один из примеров создания помех. Кроме него существует множество других методов электронного подавления и электронных атак, которые по-своему влияют на компромиссные решения, учитываемые в процессе измерений.
Корзина пуста
0
шт.
/
$0
Оформить
Очистить